近年、労働力不足を補うために、自律走行ロボットの開発が各社で進められている。オフィスのような狭い屋内環境では、人や物との衝突を回避しながら効率的に走行できるロボットが必要だ。
ロボットは、ビル内の狭い通路などで衝突を回避しようと何度も減速や停止し、目的地までの到達に遅れが生じてしまう。そのため、遅延時間も踏まえてロボットがオフィス空間を効率的に移動できる走行技術の開発が求められている。
そこでパナソニックは、AIを駆使して、ロボットが障害物のある環境でも効率的に走行経路を計画できる技術を開発した。
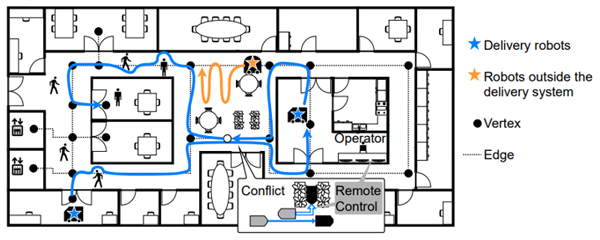
従来の技術は、複数のロボットが衝突しない経路の作成に対して、「MAPF(Multi-agent Path Finding)」と呼ばれるグリッド状のグラフを用いた。この方法は、遅延の確率分布が正確にモデル化されることが前提であり、通路にいる人やロボットの数がランダムに変わる家庭や職場での適用が難しかった。
同社が開発したロボットは、走行中に得た遅延の観測値を使い、観測された事実からその原因となる事象を確率的に推論する「ベイズ推論」を用いて、遅延が観測されるたびに確率分布のパラメータを更新して走行経路を効率的に作成する技術である。
シミュレーション実験では、従来の方法に比べて、ロボット同士の鉢合わせを約半分に抑え、目的地までの移動時間が短い走行経路の作成に成功した。この技術を使えば、人と多様なロボットが共存する屋内の狭いスペースなど、これまで自律走行ロボットが使いづらかったシーンでの活用が広がるだろう。![]()

「AXIS」編集部
Webマガジン「AXIS」の編集チーム。デザイン専門メディアらしい情報から、日々の業務で溢れ出しそうなことまで、メンバーの有り余るエネルギーをもってお伝えします。