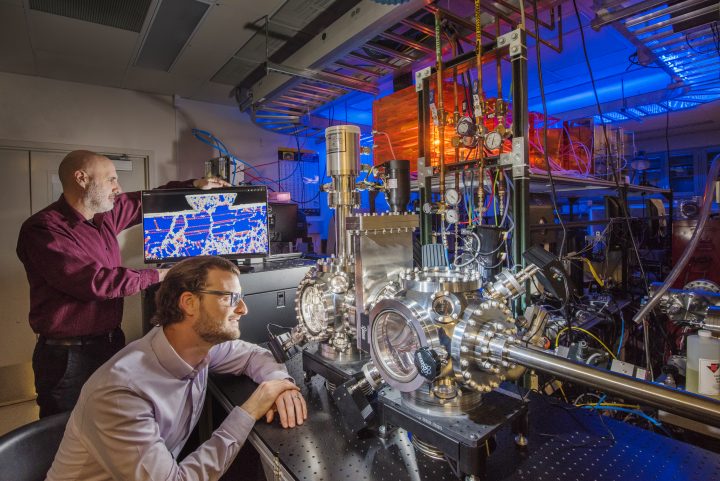





▲開発した協働ロボット試作機(Beanus2)の外観(イメージ)
新たなヒト協働ロボットの設計手法の共同研究を2020年4月から実施してきた三井化学、豆蔵、日本電産シンポの3社は、協働ロボットの「軽さ」と「柔らかさ」を設計コンセプトとして、ロボットアームのフレームの樹脂化や減速機の逆駆動性の実現に取り組んでいる。
そして今回、スキームとして、三井化学が樹脂部品の設計・成形技術、豆蔵がロボットの設計・制御技術、日本電産シンポが新型の高バックドライバビリティ減速機を提供して、10kg可搬の7軸協働ロボットの試作機「Beanus2」を開発したことを発表した。
三井化学の樹脂部品の設計・成形技術によりロボットアームのフレームの大部分を樹脂化し、同形状の金属製アームと比べて重量を最大で1/2まで軽量化。金属との接合が必要な個所には金属樹脂一体成形技術を使用し、樹脂でありながらも高い剛性を実現した。
また、日本電産シンポの高効率・低摩擦な高バックドライバビリティ減速機を使用することにより、モーター電流値で高精度に外力を検出できるようになったという。
ここに豆蔵の力制御アルゴリズムを融合することで、トルクセンサーなしでロボットアームを柔らかく制御することが可能となった。トルクセンサーを使用しないことで、センサーの故障や断線による誤動作抑止、関節部の省スペース・軽量化が期待できるそうだ。![]()

「AXIS」編集部
Webマガジン「AXIS」の編集チーム。デザイン専門メディアらしい情報から、日々の業務で溢れ出しそうなことまで、メンバーの有り余るエネルギーをもってお伝えします。