




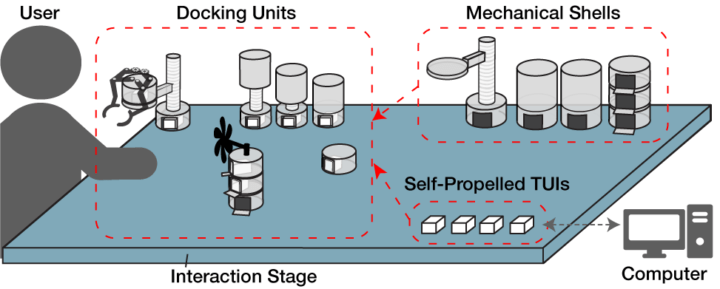
MITメディアラボで研究が進められているKen Nakagakiらによるプロジェクト「HERMITS」は、ロボットを使ったタンジブルユーザインタフェースの多様性を大きく向上させるものだそうだ。

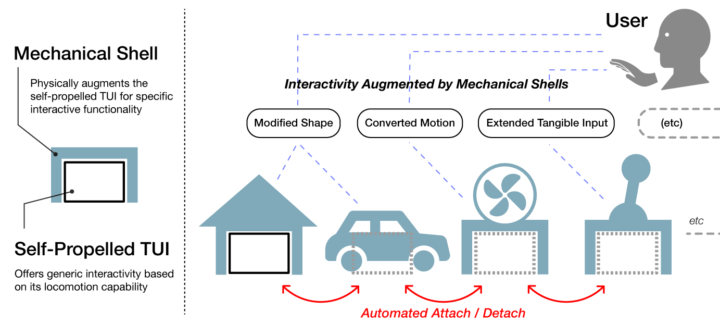
研究チームが開発したのは、卓上型ホイールロボットを使ったモジュラーシステムで、ヤドカリにヒントを得た「メカニカルシェル」と呼ばれるパッシブアタッチメントモジュールとドッキングさせることができるという。
▲ Credit:Ken Nakagaki
このメカニカルシェルにはさまざまなタイプのものがあり、ロボットの動きをそれぞれ独自に拡張したり変換したりできるので、自己再構成によって幅広いインタラクティブな機能を提供することができるのだ。
▲ Credit:Ken Nakagaki
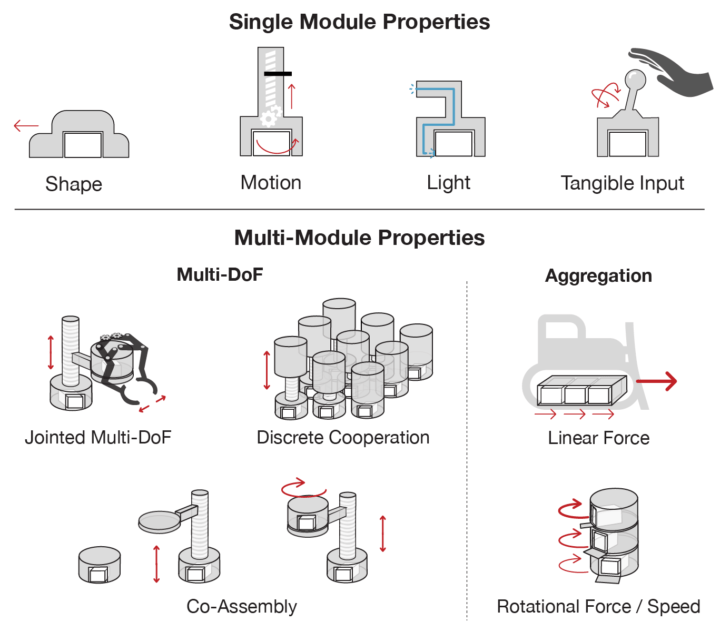
▲ Credit:Ken Nakagaki
実証実験では、ロボット玩具「toio」をベースにインタラクティブシステムを構築。アクティブドッキング機能を可能にするためにいくつかの変更を加え、1台のコンピュータで複数のtoioの入出力を処理するために、制御アーキテクチャをカスタマイズした。そして、さまざまなメカニカルシェルを4つの基本デザインで設計、3Dプリンタで製造したという。

HERMITSは全体のアプローチとして、日常生活のなかにある物理インタフェースとコンピュータが、パッシブアタッチメントを使ったユーザーインタラクションのために適応したり再構成したりする方法を拡張するものである。
▲ Vertical Motion and Fan Shells
▲ Mechanical Shell Examples: Vehicle and Traffic Light Shells
▲ Mechanical Shell Example: Knob and Slider Shells
現代では、ロボット掃除機やドローンといった形で、ロボットシステムが私たちの生活空間のなかに入り込んできている。今回はプロトタイプとしてHERMITSのコンセプトを紹介しているが、メカニカルシェルを切り替えることで、日常にあるロボットシステムが数多くの機能や表現力、双方向性を持つことができる大きな可能性を示している。![]()
▲ Mechanical Shell Examples: Walking Shell
▲ Gripper Shell and Joystick Shell
▲ Aggregation Shells
▲ Strandbeest Shell

「AXIS」編集部
Webマガジン「AXIS」の編集チーム。デザイン専門メディアらしい情報から、日々の業務で溢れ出しそうなことまで、メンバーの有り余るエネルギーをもってお伝えします。