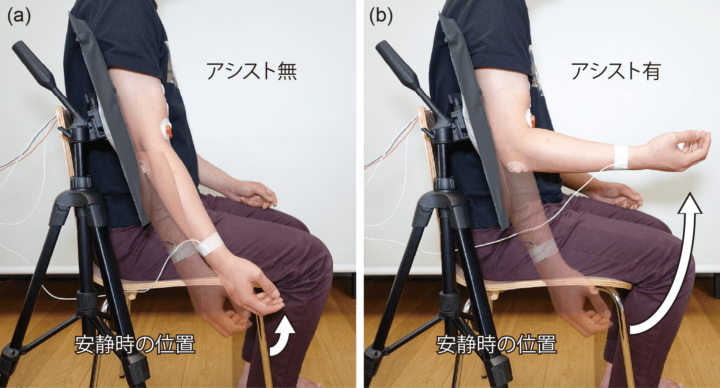
▲ 図1:本研究で構築した増幅運動システム
(a)アシストを行わず、自発的運動のみで前腕部を動かした状態
(b)上腕二頭筋につけた筋電位計で前腕部の運動を検知し、筋電気刺激によるアシストを行い、運動を増幅させた状態
東京大学 先端科学技術研究センターの研究チームは、人間と機械の協調的な運動の設計に有用な手がかりを発見したことを発表した。
スマートウォッチやスマートグラスといったウェアラブルデバイスが製品化され、人間の生活を支援する機械が社会に浸透しつつある。特に、パワーアシスト装置をはじめとした「人間機械協調システム」には大きな期待が寄せられている。
ただ、機械が人間の運動を支援する場合、人間と機械の運動を効果的に融合させるためには、人間の運動・生体信号を正確に計測した上で、状況や意図を適切にくみ取る必要がある。
しかし、人間のダイナミックな動作を完全に予測することは難しく、機械の動作が人間の意図とずれてしまう場合があり、人間が機械の動作のタイミングを予測できない場合には、本来意図した運動が機械によって妨害されることもあるという。
そこで、この研究では、人間の行動に合わせてその動きを支援するシステムの設計において十分に検討されていない、人間側の知覚と機械側からの支援のタイミングの問題に着目。人間の自発的意図に基づく随意運動(自発的運動)のタイミングに合わせて、機械から筋電気刺激を与え、機械が人間の運動を増幅させる実験系を構築した。
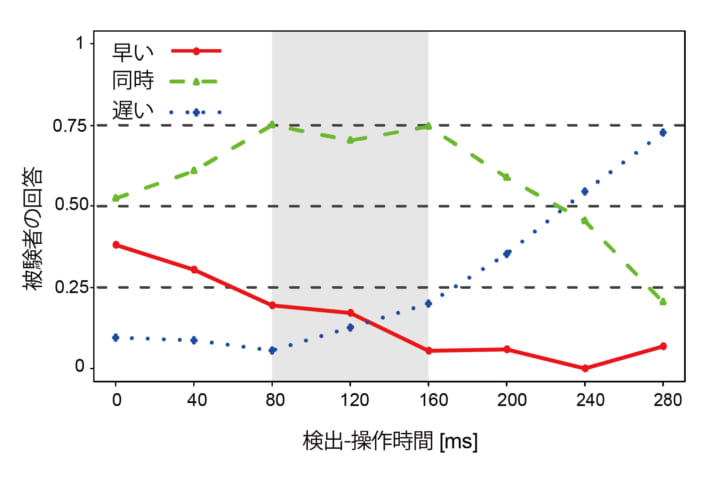
▲ 図2:被験者の回答と検出‐操作時間。検出‐操作時間が80-160 ms程度で「同時」と答える割合が高い
実験ではまず、自発的運動の開始から機械による介入までの時間差が知覚的に同時だと感じられる時間範囲を同定。これにより、機械が人間の動作に介入するタイミングを設計する上で重要な手がかりを得ることができた。
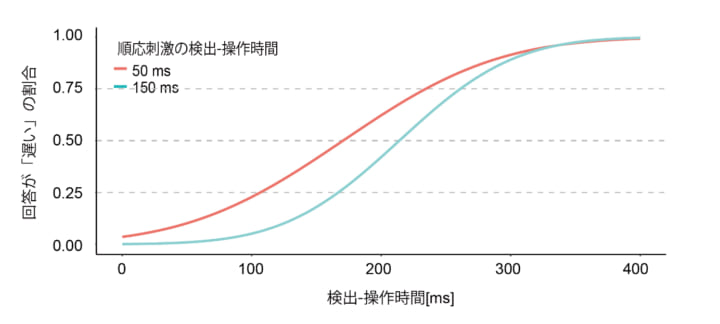
▲ 図3:「遅い」と回答した割合と検出‐操作時間。順応刺激の検出‐操作時間が50 msであると、150 msであった場合に比べ、「遅い」と回答する割合が高くなる時間が早い
また、自発的運動と外部操作運動の知覚的同時性に順応的変化が生じるかどうかを検証。順応前は同時ではないと感じていた刺激でも、同時だと感じることができるようになることが示唆され、人間と機械の動作のずれを防止する有効な手段となりえることがわかった。
研究チームは今後、人間と機械の両面から研究を進め、外部から運動を与えて操作・補助を行う場合の人間の認知メカニズムの解明や、利用者の運動を妨害しない安全な人間機械協調システムへの応用など、幅広い展開を目指すことにしている。![]()

「AXIS」編集部
Webマガジン「AXIS」の編集チーム。デザイン専門メディアらしい情報から、日々の業務で溢れ出しそうなことまで、メンバーの有り余るエネルギーをもってお伝えします。