




▲Credit:Ryan L. Truby, MIT CSAIL
柔軟性の高い材料で作られたソフトロボットは、安全で適応力や弾力性をもち、これまでのがちっとしたロボットに代わって、生物のように機能する「バイオインスパイアード(bioinspired)」な代替品として注目を集めている。
しかし、こうした形を変えるロボットに自律制御の機能をもたせるのは難しいそうだ。いつでもどんな方向にでも動いてしまう恐れがあり、オートメーション向けのプランニングや制御モデルを立てるのが困難なのである。
▲Credit:Ryan L. Truby, MIT CSAIL
そこで、マサチューセッツ工科大学の研究チームは、ソフトロボットアームに「センサー内蔵の皮膚」をとりつけ、立体的な空間のなかで位置認識ができるようにする実験を行っている。
そこで重要となるのが、体の動きや位置を把握する「自己受容感覚(proprioception)」と呼ばれるもの。センサーから得た情報を深層学習にかけて選別することで、ロボットは三次元的な位置決定を行う。
▲Credit:Ryan L. Truby, MIT CSAIL
▲Credit:Ryan L. Truby, MIT CSAIL
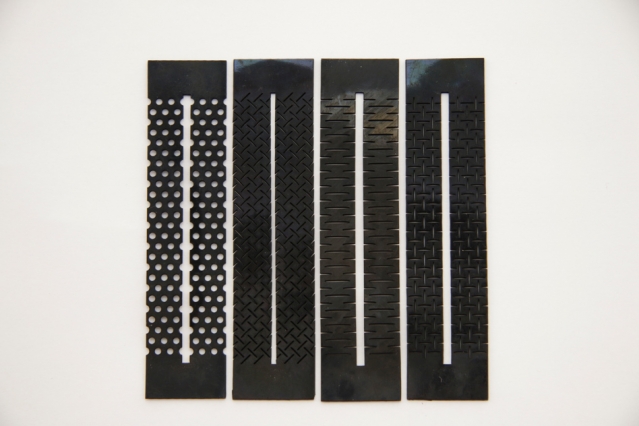
センサーは、「電磁干渉シールド」に使われるシート状の導電材料という手近なもので作れるそうで、従来のように複数のモーションキャプチャカメラを使う大がかりな視覚システムは不要。私たちは目を閉じても「肌感覚」でさまざまなことを認識できるが、それと同じものを作り上げるのが目標だ。
▲Credit:Ryan L. Truby, MIT CSAIL
ただ、あまり伸縮性がなかったので、切り紙にヒントを得て、材料にさまざまなパターンの切り込みを入れることにした。その結果、非常に柔軟で伸縮性があり、見た目も美しいシートができあがったそうだ。![]()

「AXIS」編集部
Webマガジン「AXIS」の編集チーム。デザイン専門メディアらしい情報から、日々の業務で溢れ出しそうなことまで、メンバーの有り余るエネルギーをもってお伝えします。





