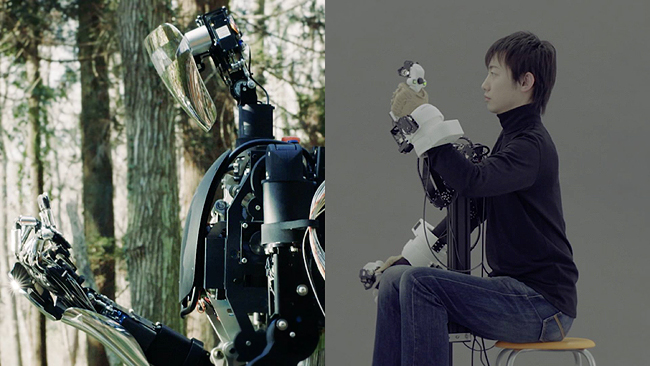





MELTIN MMIは、ロボット遠隔操作による宇宙飛行士の作業代替を目指すJAXA(宇宙航空研究開発機構)筑波宇宙センターの国際宇宙ステーション「きぼう」日本実験棟模擬フィールドにて、アバターロボット「MELTANT-α」を用いた初期実証を実施した。
多額のコストがかかる有人宇宙計画において、宇宙飛行士の作業時間の効率化のために、アバターロボットがその作業を代替することを目指したものだそうだ。

MELTINは身体による限界を突破し、人類の創造性を開放するためのサイボーグ技術の開発を目指し、その第一歩として、身体の動作を忠実に解析する「生体信号処理技術」と、生体模倣から着想を得た「ロボット機構制御技術」で実用性の高い筋電義手を開発してきた。
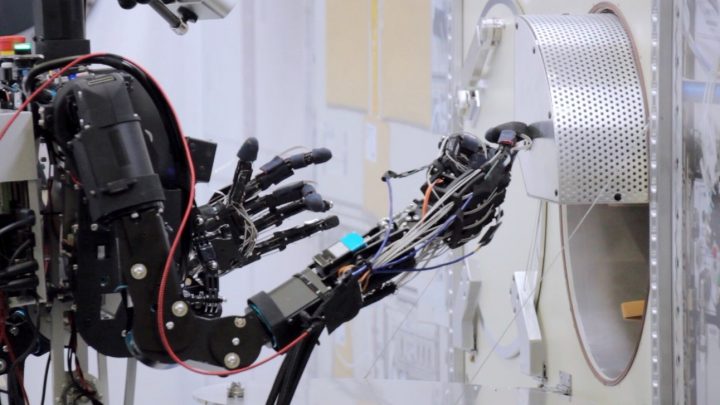
この経験を活かして開発されたアバターロボット「MELTANT-α」は、世界で初めて力強さと繊細な動きを両立した「人間の手に最も近い」ロボットハンドを備え、従来のロボットハンドには困難な複雑で柔軟な作業が可能となった。われわれの未来の生活にもかかわる今後の進展が期待される。![]()

「AXIS」編集部
Webマガジン「AXIS」の編集チーム。デザイン専門メディアらしい情報から、日々の業務で溢れ出しそうなことまで、メンバーの有り余るエネルギーをもってお伝えします。